Синхронный реактивный двигатель
Содержание:
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
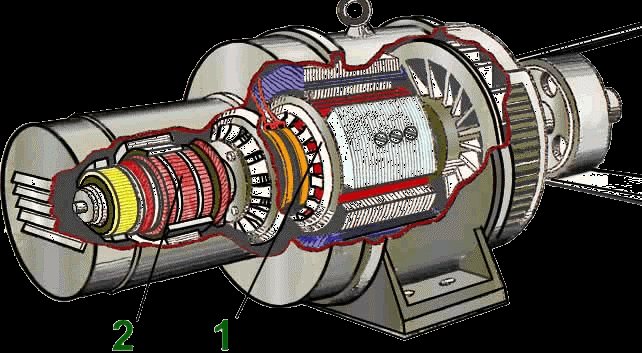
1 – ротор, 2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Рекомендации

Выбор рассматриваемого электродвигателя следует проводить с учетом следующих особенностей:
Мощность – основной показатель, который влияет на срок службы. При возникновении нагрузки, которая превосходит возможности электродвигателя, он начинает перегреваться. При сильной нагрузке, возможно искривление вала и нарушение целостности других компонентов системы. Поэтому следует помнить о том, что диаметр вала и другие показатели выбираются в зависимости от мощности двигателя.
Наличие системы охлаждения. Обычно особого внимания на то, как проводится охлаждение, никто не уделяет
Однако при постоянной работе оборудования, к примеру под солнцем, следует задуматься о том, что модель должна быть предназначена для продолжительной работы под нагрузкой при тяжелых условиях.
Целостность корпуса и его вид,год выпуска – основные моменты, на которые уделяют внимание при покупке двигателя бывшего употребления. Если имеются дефекты корпуса, велика вероятность того, что конструкция имеет повреждения и внутри
Также, не стоит забывать о том, что подобное оборудование с годами теряет свой КПД.
Особое внимание нужно уделятькорпусу, так как в некоторых случаях можно провести крепление только в определенном положении. Самостоятельно создать посадочные отверстия, приварить уши для крепления практически невозможно, так как нарушение целостности корпуса не допускается.
Вся информация об электродвигателе находится на пластине, которая прикрепляется к корпусу. В некоторых случаях, есть только маркировка, по расшифровке которой можно узнать основные показатели работы.
В заключение отметим, что многие двигатели, которые были произведены несколько десятилетий назад, зачастую проходили восстановительные работы. От качества проведенной восстановительной работы зависят показатели электродвигателя.
Источник
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
Варианты устройства синхронных двигателей
Разновидности роторов
Принцип работы ротора
Один из вариантов конструкции двигателя
Ротор с постоянными магнитами
Гистерезисный движок
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
Классический движок с индуктором
Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения
Для этой цели делаются специальные движки, называемые синхронными компенсаторами
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
Движки-компенсаторы на подстанции
Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
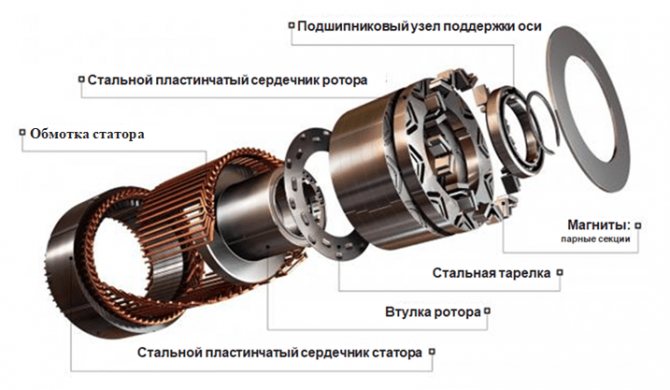
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
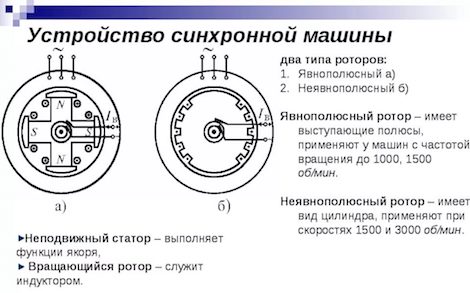
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Преимущества электродвигателей
Благодаря конструкционной оптимизации вентильная силовая техника обеспечивает множество эксплуатационных преимуществ. В их числе стоит отметить быстродействие, гибкость в настройке, точность определения позиции ротора (с помощью датчика), широкие возможности технической подстройки и т.д. При скромных энергозатратах можно получить высокую силовую отдачу
Что еще важно, вентильный электродвигатель задействует небольшой ресурс механического действия, а это благоприятно сказывается и на его сроке эксплуатации. Низкий уровень термического воздействия на элементную базу обуславливает отсутствие перегревов, поэтому детали лишь в редких случаях требуют замены по причине износа
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.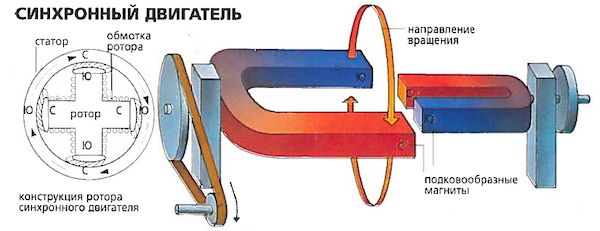
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.