Особенности бесколлекторного двигателя постоянного тока: что это такое и как работает
Содержание:
- Устройство и принцип действия
- Части электродвигателя
- Как устроен бесщеточный двигатель
- Принцип работы бесколлекторного мотора
- Устройство БКЭПТ
- Минусы коллекторных моторов
- Крепеж двигателя
- Где применяются бесколлекторные двигатели
- Преимущества бесколлекторного двигателя
- Общие сведения, устройство, сфера применения
- Трёхфазный бесколлекторный электродвигатель постоянного тока
- Заключение
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.

Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
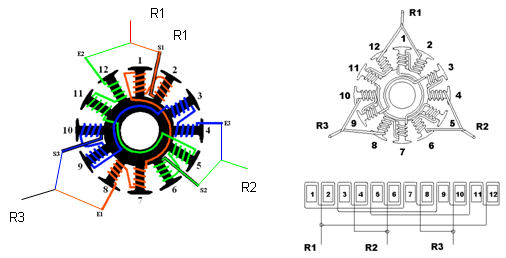
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
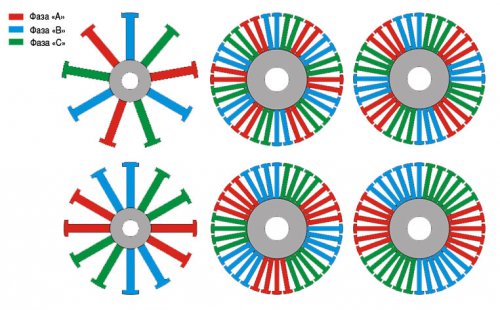
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер “знал”, в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.

Части электродвигателя
Основные два элемента, которые в наибольшей степени характеризуют электрический двигатель это статор и ротор. Именно ротор электрической машины вращается в агрегате под воздействием магнитного поля, возникающего в статоре
Это магнитное поле создается непосредственно под влиянием третьего по важности компонента электромотора, его обмотке. Для создания магнитного поля необходимо соблюдение трех основных условий:
- Наличие не менее двух обмоток
- Обязательное отличие по фазам тока в обмотках
- Смещение оси обмоток в пространстве
Наличие в статоре двух обмоток говорит о том, что электродвигатель однофазный, а три обмотки характеризуют трехфазный электродвигатель.

Четвертый основной элемент любого электродвигателя это его корпус. Он изготавливается из сплава алюминия или из чугуна в зависимости от особенностей использования агрегата и высоты оси его вращения.
Ротор эл двигателя запрессовывается на вал под действием специального технологического процесса, его сердечник состоит из прессованных стальных листов, в пазы которого заливается металл, образуя стержни. С помощью торцевых колец эти стержни замыкаются накоротко. Название такой конструкции «беличья клетка». По краям корпуса находятся подшипниковые щиты, в которых, в свою очередь устанавливаются различные подшипники в зависимости от конструкции электродвигателя и особенностей его применения.

На заднем подшипниковом щите устанавливается вентилятор для охлаждения мотора, который закрывается защитным кожухом предотвращающим попадание инородных частиц. При работе от частотно регулируемого привода дополнительно устанавливается узел принудительной вентиляции.
В зависимости от способа установки электродвигателя он может иметь фланец с приводной стороны, а может и не иметь, при условии установки его только на лапы. На электродвигатели, которые требуют торможения,электромагнитный тормоз дополнительно устанавливается на общепромышленный электродвигатель. О дополнительных модификациях электродвигателей читайте в этой статье.
Для подключения двигателя используется коробка выводов или БОРНО, которая по умолчанию устанавливается в верхней части агрегата. Если того требует особенность установки , БОРНО можно разместить на боковой поверхности электромотора. Либо переставить лапы двигателя на боковую поверхность, что обеспечит расположение коробки выводов на боковой плоскости. Такая манипуляция возможна только на двигателях в алюминиевом корпусе.
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле.
В настоящее время существует несколько типов устройств, имеющих различные характеристики.
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.
Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Устройство БКЭПТ
Схему расположения магнитов внутри статора обычно применяют для двухфазных двигателей с небольшим количеством полюсов. Принцип крутящего момента вокруг статора применяют при необходимости получить двухфазный двигатель с небольшими оборотами.
 На роторе расположены четыре полюса. Магниты в форме прямоугольника устанавливаются, чередуя полюсы. Однако не всегда количество полюсов равняется числу магнитов, которых может быть 12, 14. Но количество полюсов должно быть четным.Несколько магнитов могут составлять один полюс.
На роторе расположены четыре полюса. Магниты в форме прямоугольника устанавливаются, чередуя полюсы. Однако не всегда количество полюсов равняется числу магнитов, которых может быть 12, 14. Но количество полюсов должно быть четным.Несколько магнитов могут составлять один полюс.
На картинке изображено 8 магнитов, формирующих 4 полюса. Момент силы зависит от мощности магнитов.
Минусы коллекторных моторов
Сами по себе коллекторные моторы неплохо справляются со своей работой, но это лишь до того момента пока не возникает необходимость получить от них на выходе максимально высокие обороты. Все дело в тех самых щетках, о которых упоминалось выше. Так как они всегда находятся в плотном контакте с коллектором, то в результате высоких оборотов в месте их соприкосновения возникает трение, которое в дальнейшем вызовет скорый износ обоих и в последствии приведёт к потере эффективной мощности эл. двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
Крепеж двигателя

Моторама- механизм крепления двигателя. Применяется в установках двигателей. Моторама представляет собой взаимосвязанные стержни и элементы каркаса. Моторамы бывают плоскими, пространственными по элементам. Моторама одиночного двигателя 30 вольт или нескольких устройств. Силовая схема моторамы состоит из совокупности стержней. Моторама устанавливается в сочетании ферменных и каркасных элементов.
Бесколлекторный электродвигатель постоянного тока незаменимый агрегат, применяемый как в быту, так и в промышленности. Например, ЧПУ станок, медицинское оборудование, автомобильные механизмы.
БКЭПТ выделяются надежностью, высокоточным принципом работы, автоматическим интеллектуальным управлением и регулированием.
Бесколлекторные двигатели обладают улучшенными показателями мощности на килограмм веса (собственного) и широким диапазоном скорости вращения; впечатляет и КПД этой силовой установки
Немаловажно, что от установки практически не излучаются радиопомехи. Это позволяет разместить рядом с ней чувствительное к помехам оборудование без опасений за корректность работы всей системы
Расположить и использовать бесколлекторный двигатель можно в том числе и в воде, это не повлияет на него отрицательным образом. Также его конструкция предусматривает расположение и в агрессивных средах. Однако в этом случае следует заранее продумать месторасположение блока управления. Помните, что только при бережной аккуратной эксплуатации силовой установки она будет работать на вашем производстве эффективно и бесперебойно на протяжении долгих лет.
Длительный и кратковременный режим работы — основные для БД. Например для эскалатора или конвейера подходит длительный режим работы, в котором электродвигатель работает статично в течение долгого количества часов. Для длительного режима работы предусмотрена повышенная внешняя теплоотдача: тепловыделения в окружающую среду должны превышать внутренние тепловыделения силовой установки.
В кратковременном режиме работы двигатель за время своей работы не должен успеть нагреться до максимального значения температуры, т.е. должен быть выключен до наступления этого момента. Во время перерывов между включениями и работой двигателя он должен успеть остыть. Именно так работают бесколлекторные двигатели в подъемных лифтовых механизмах, электробритвах, сушилках фенах и другом современном электрооборудовании.
Сопротивление обмотки двигателя связано с коэффициентом полезного действия силовой установки. Максимального КПД можно достигнуть при наименьшем сопротивлении обмотки.
Максимальное рабочее напряжение — это предельное значение напряжения, которое можно подавать на обмотку статора силовой установки. Максимальное рабочее напряжение напрямую связано с максимальными оборотами двигателя и и максимальным значением тока обмотки. Максимальное значение тока обмотки лимитировано возможностью перегрева обмотки. Именно по этой причине необязательным, но рекомендуемым условием эксплуатации электродвигателей является отрицательная температура окружающей среды. Она позволяет значительно компенсировать перегрев силовой установки и увеличить длительность ее работы.
Максимальная мощность двигателя — это предельная мощность, которой может достигнуть система за несколько секунд. Стоит учитывать, что длительная работа электродвигателя на максимальной мощности неизбежно приведет к перегреву системы и сбою в его работе.
Номинальная мощность — это та мощность которую может развивать силовая установка в течение периодичного заявленного производителем разрешенного периода работы (одно включение).
Угол опережения фазы предусмотрен в электродвигателе из-за необходимости компенсации на задержку переключения фаз.
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
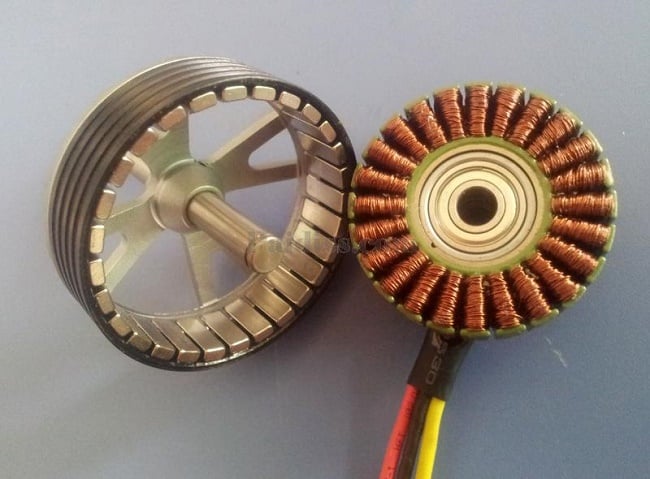
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
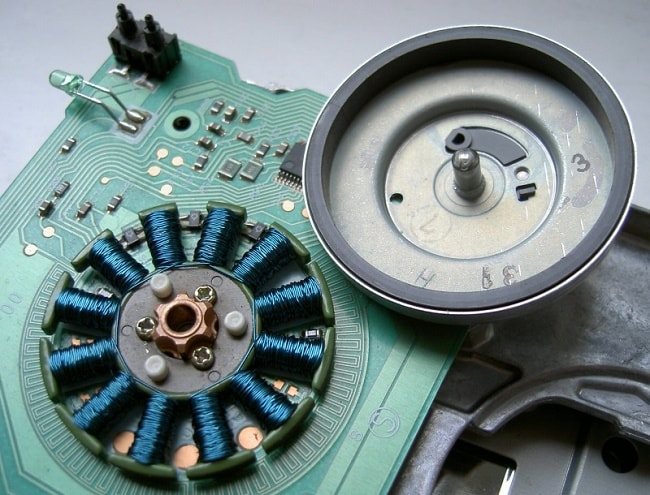
Бесколлекторный двигатель в компьютерном дисководе
Трёхфазный бесколлекторный электродвигатель постоянного тока
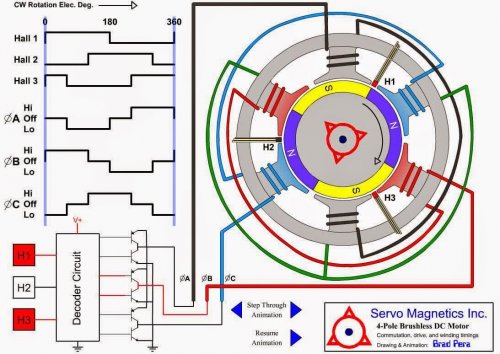
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Заключение
Бесколлекторный электродвигатель постоянного тока имеет массу преимуществ и станет достойным выбором для использования как специалистом, так и простым обывателем.
Немного из истории:
Главная проблема всех двигателей — это перегревание. Ротор вращался внутри какого-нибудь статора, и поэтому тепло от перегрева никуда не уходило. Людям пришла в голову гениальная идея: вращать не ротор, а статор, который при вращении охлаждался бы воздухом. Когда создали такой двигатель, он стал широко использоваться в авиации и судостроении, и поэтому его прозвали Вентильным двигателем.
Вскоре был создан электрический аналог вентильного двигателя. Назвали его бесколлекторным мотором, потому что у него не было коллекторов (щеток).
Бесколлекторный двигатель.
Бесколлекторные (brushless англ.) электродвигатели пришли к нам сравнительно недавно, в последние 10-15 лет
. В отличие от коллекторных моторов они питаются трехфазным переменным током. Бесколлекторные двигатели эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД
. Конструкция двигателя при этом относительно проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Можно сказать, что бесколлекторные моторы практически не изнашиваются. Стоимость бесколлекторных двигателей несколько выше, чем коллекторных. Это вызвано тем, что все бесколлекторные моторы снабжены подшипникам и, как правило, изготовлены более качественно.


Испытания показали:
Тяга с винтом 8х6 = 754 грамма
,Частота вращения = 11550 об/мин
,Потребляемая мощность = 9 ватт
(без винта), 101 ватт
(с винтом),

Мощность и КПД
Мощность можно вычислить вот таким способом:1) Мощность в механике вычисляется по такой формуле: N= F*v
, где F — сила, а v — скорость. Но так как, винт находится в статическом состояние, то движения нет, кроме вращательного. Если этот мотор установить на авиамодель, то можно было бы замерить скорость (она равна 12 м/с) и посчитать полезную мощность:N полез= 7.54*12= 90.48 ватт
2) КПД электрического двигателя находится по такой формуле: КПД= N полезной/N затраченной *100%
, где N затрат= 101 ватт
КПД= 90.48/101 *100%= 90%
В среднем КПД бесколлекторных двигателей реально и колеблется около 90% (самый большой КПД достигнутый данным видом моторов равен 99.68%
)
Характеристики двигателя:
Напряжение: 11.1 вольт
Обороты: 11550 об/мин
Максимальная сила тока: 15А
Мощность: 200 ватт
Тяга: 754 грамм (винт 8х6)

Заключение:
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос. Что такое коллекторный и ? Какой из них лучше поставить на свою радиоуправляемую электромодель?
Коллекторные моторы, которые так часто используются для приведения в движение электромоделей на радиоуправлении, имеют всего два исходящих питающих провода. Один из них «+» другой « — ». В свою очередь они подключаются к регулятору скорости вращения. Разобрав коллекторный мотор, вы всегда там найдете 2 магнита изогнутой формы, вал совместно с якорем, на который намотана медная нить (проволока), где по одну сторону вала стоит шестерня, а по другую сторону располагается коллектор, собранный из пластин, в составе которых чистая медь.